Installing and Starting Gazebo
Description: How to get Gazebo up and running.
Tutorial Level: BEGINNER
Users are highly discouraged from using the documentation and tutorials for Gazebo on this page. Gazebo is now a stand alone project at gazebosim.org. See documentation there, thanks!
Installation
Install ROS and get the simulator_gazebo package by (%YOUR_ROS_DISTRO% can be < electric, fuerte, groovy`> etc.):
sudo apt-get install ros-%YOUR_ROS_DISTRO%-simulator-gazebo
Note: This does not work for the indigo distribution. Instead, try the following:
sudo apt-get install ros-indigo-simulators
Launching Gazebo
Setup ros environment variables:
source /opt/ros/%YOUR_ROS_DISTRO%/setup.bash
The standard Gazebo launch file is started using:
roslaunch gazebo_worlds empty_world.launch
Except in the case of Indigo, where the launch file is started using:
roslaunch gazebo_ros empty_world.launch
This should start the simulator and open up a GUI window that looks like this:
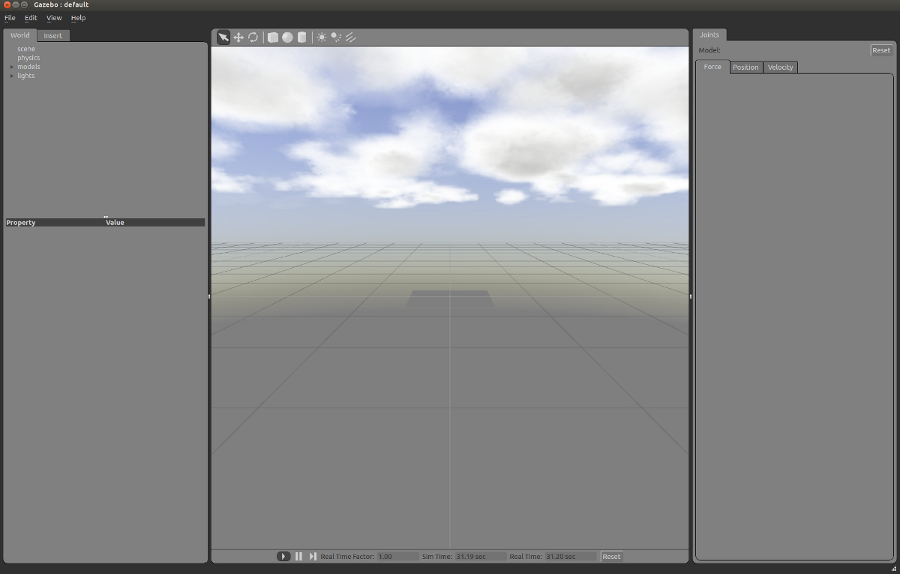
Launch Script Explained
Looking at the gazebo_worlds/launch/empty_world.launch,
The script simply starts the Gazebo executable with a default world file (empty.world). The world file is where you can customize basic features of the simulator, such as physics engine parameters, ground plane textures, lighting and etc. For most users, the standard world file loaded by empty_world.launch should suffice. The ROS parameter /use_sim_time triggers ROS time to use the simulation time in the /clock ROS topic published by gazebo rather than the system wall clock time, see here for more details.
Wiki: simulator_gazebo/Tutorials/StartingGazebo (последним исправлял пользователь LucasWalter 2014-11-11 19:16:11)
Gazebo
Мощное программное обеспечение для исследования сенсорных систем и робототехники.
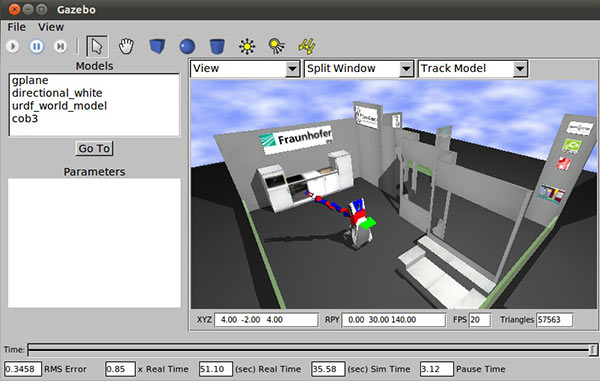
Программный комплекс Gazebo представляет собой среду для симулирования работы виртуальных роботов с различными сенсорами в окружении всевозможных объектов. Приложение состоит из графической части и части по имитированию взаимодействия твердых объектов, позволяя моделировать динамику и кинематику механизмов роботов (включая моменты взаимодействия с телами внешней среды) и формировать физически правдоподобные показания виртуальных датчиков. Программа Gazebo имеет гибкий дизайн и удобный интерфейс, поддерживающий одновременную работу с несколькими устройствами. Для работы в данной среде необходимо хорошее знание C++ и UNIX-систем.
Симулятор Gazebo имеет свой собственный редактор, позволяющий без программирования создавать трехмерные сцены и включающий огромную библиотеку моделей. Программа также предоставляет следующие возможности:
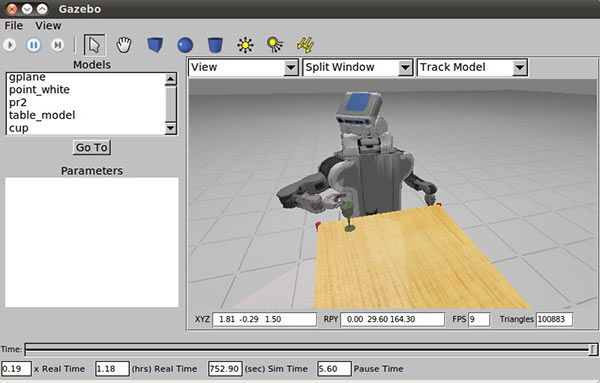
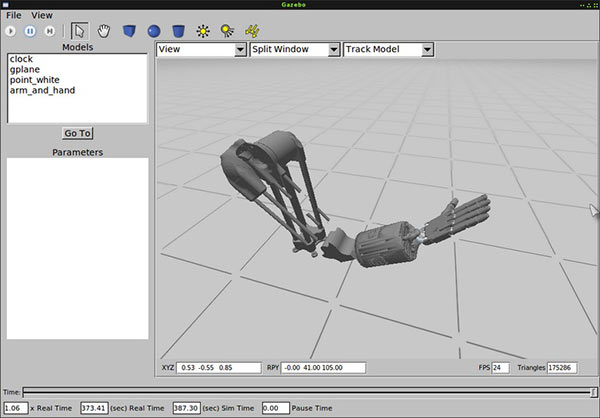
- Использование популярных общеизвестных моделей роботов, таких как: iRobot Create, PR2, TurtleBot, Pioneer 2 DX, Segway RMP, Pioneer 2 AT. Помимо заранее созданных разработчиками моделей есть возможность самостоятельного проектирования необходимых устройств (сенсоров и роботов), загрузки их в мир и дальнейшей симуляции. Однако устройства, модели которых уже есть в программе, эмулируются с гораздо более высокой точностью.
- Поддержка и симулирование работы множества различных сенсоров, в том числе сонара, лазерного дальномера, датчиков семейства IMU, моно- и стереокамер, кинект-сенсоров, прибора для чтения RFID-меток и других.
Для создания качественной графики к ПО Gazebo можно подключить объектно-ориентированный графический движок OGRE с открытым исходным кодом. Также симулятор способен читать файлы в формате COLLADA, что позволяет добавлять в приложение объекты, созданные в сторонних редакторах 3D-моделей.
Наряду с программой Stage (двумерным симулятором роботов), Gazebo совместим с приложением Player – кросс-платформенным ПО для исследования робототехнических систем. Данная среда обеспечивает сетевой интерфейс между управляющими программами и добавляемыми разработчиками модулями/драйверами реального оборудования. Таким образом, написанная в Gazebo и там же отлаженная управляющая программа может без изменений быть перенесена на настоящее оборудование или на другой симулятор. Также среда симуляции Gazebo совместима с ROS – операционной системой для программирования роботов.
ПО Gazebo было создано независимой группой разработчиков, финансируемых организацией Open Source Robotics Foundation (США, штат Калифорния, город Маунтин-Вью), созданной в свою очередь с целью поддержки развития программного обеспечения в области робототехники. В настоящее время проект Gazebo активно развивается – одна за другой выходят новые версии симулятора, а обширное сообщество пользователей предоставляет свои собственные библиотеки и инструменты, сенсоры и плагины. Данная программа используется в конкурсах DARPA Robotics Challenge – ежегодном соревновании роботизированных механизмов, проводящемся агентством передовых исследований при Минобороны США и призванном помогать спасателям в ходе ликвидации последствий техногенных аварий и стихийных бедствий.
Программное обеспечение Gazebo является открытым и абсолютно бесплатно для использования. На сайте имеется множество учебников (разделенных по степени подготовки пользователей), загружаемые библиотеки моделей, а также блог. Сама программа содержит массу обучающих примеров и хорошую документацию.
Приложение написано на английском языке, русификатора к нему нет.
Программный комплекс Gazebo поддерживается Unix-подобными операционными системами. Поскольку приложение позволяет моделировать в 3D, оно требовательно к ресурсам компьютера и модели видеокарты.
Распространение программы: бесплатная (OpenSource проект)
Saved searches
Use saved searches to filter your results more quickly
Cancel Create saved search
You signed in with another tab or window. Reload to refresh your session. You signed out in another tab or window. Reload to refresh your session. You switched accounts on another tab or window. Reload to refresh your session.
Gazebo
Tools and libraries for robotics applications. Home of the Gazebo simulator.
Gazebo brings a fresh approach to simulation with a complete toolbox of development libraries and cloud services to make simulation easy. Iterate fast on your new physical designs in realistic environments with high fidelity sensors streams. Test control strategies in safety, and take advantage of simulation in continuous integration tests. Full project details are available at GazeboSim.org
There are two major versions of Gazebo: Gazebo Classic, and Gazebo (formerly Ignition). Gazebo Classic releases use numbers to track versions while Gazebo uses lettered release names (e.g. Fortress, Garden, etc). A comparison between the two major versions of Gazebo can be found here. We recommend new Gazebo users start with the lastest release Gazebo Garden. Check out this video if you want to learn all about the new features in Gazebo Garden.
Looking to get started with simulations in Gazebo? Our installation guide is available here. If you want to install Gazebo and ROS together we recommend this guide. Once you’ve installed Gazebo start learning with our beginner tutorials.
Join the Gazebo Community
- Gazebo Discussion Forum
- Gazebo Discord Server
- Robotics Stack Exchange (preferred Gazebo support forum).
- Official Gazebo Videos
- Gazebo Resource Status Page
- Gazebo Installation Instructions
- Gazebo Tutorials
- Gazebo Documentation
- Gazebo Website
- Gazebo Source Code
- Gazebosim Simulation Assets (aka Fuel)
- Gazebo Plugins
- Gazebo Youtube Channel
- Gazebo Graphics and Trademark
Using ROS with Gazebo
- ROS / Gazebo Installation Guide
- ROS 2 / Gazebo Project Template
- ROS 2 / Gazebo Example Code
- TurtleBot4 Simulator
- ROS / GZ Bridge
- ROSCon, our yearly developer conference than includes Gazebo developers.
- Open Source Robotics Foundation Events Calendar — submit an event
- Open Source Robotics Foundation Community Events Calendar — submit an event
On Social Media
- Gazebo Sim Twitter
- Open Robotics on Twitter
- Open Robotics on LinkedIn
Gazebo is made possible through the generous support of open source contributors and the non-profit Open Source Robotics Foundation (OSRF). Tax deductible donations to the OSRF can be made here.
При подготовке материала использовались источники:
https://wiki.ros.org/simulator_gazebo/Tutorials/StartingGazebo
https://cxem.net/software/gazebo.php
https://github.com/gazebosim